Name
Role
Description
📧 email@domain.com
📱 phone number
Role
Description
19 degrees of freedom. Custom 3D-printed chassis. Tower Pro MG995 servo actuation. Built to compete.
Robot Image
Replace with actual photo
19
servo
2.5
KG
Click on any highlighted area to explore the robot's components and technical specifications.
Robot Interactive View
Click hotspots to explore parts
Description
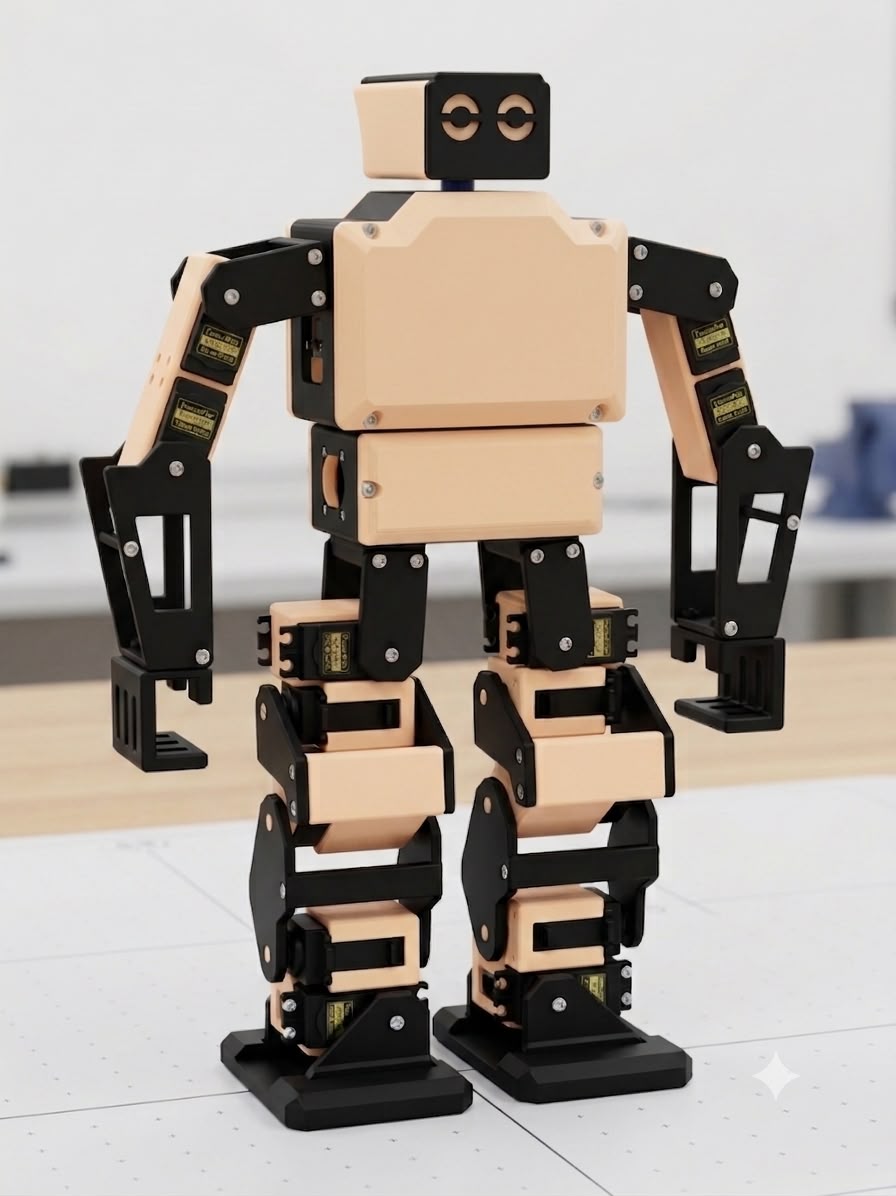
BYTE is a 19-degree-of-freedom humanoid robot designed and built to compete in robotics field. The platform features a custom 3D-printed chassis optimized for weight distribution, paired with high-torque Tower Pro MG995 metal gear servos for reliable actuation under competition conditions.
Every design decision — from servo placement to cable routing to center of gravity optimization.
Arduino Mega
microcontroller board
HC-05
bluetooth
2.5
KG
19
Servos
Every joint optimized for competition performance with minimal backlash and maximum repeatability.
50Hz servo update rate with synchronized multi-axis coordination for smooth motion profiles.
Quick-swap servo mounts and standardized interfaces enable rapid maintenance and upgrades.
Designed and tested against official competition rules and task requirements.
@OnClick(R.id.btn_forward) void forward() {
sendMessage("1");
}
@OnClick(R.id.btn_backward) void backward() {
sendMessage("90");
}
@OnClick(R.id.btn_left) void left() {
sendMessage("0");
}
@OnClick(R.id.btn_right) void right() {
sendMessage("180");
}
@OnClick(R.id.btn_disconnect) void disconnect() {
if (bluetoothService != null) {
bluetoothService.stop();
}
finish();
}Custom Android application with button controls for commanding the robot via Bluetooth. Uses EventBus for communication.
Sends commands as messages to control servo positions and robot movement.
Separate modules for Bluetooth service, command handling, and UI event management.
The robot is fully assembled with all hardware components integrated. Structural stability and system functionality have been successfully verified.
The robot can raise its hand and perform a
Wave-Hi! gesture on command. Smooth motion control and actuator coordination achieved.
The robot is capable of moving its head left, right, up, and down. Real-time responsiveness and controlled motion implemented.
Enable autonomous walking on flat surfaces. Focus on balance control, gait optimization, and stable locomotion.
Integrate voice interaction and speaking capabilities. The robot will be able to listen, process commands, and respond verbally.
Navigate through a course with static obstacles using ultrasonic sensors. Real-time path planning and obstacle detection.
[TBD]
Competition
6
Target Tasks
3
Completed
3
Future Planning

Project Leader & Hardware Development
Leads the overall project execution, overseeing system architecture, 3D design, and mechanical integration. Ensures seamless coordination between hardware components and maintains structural reliability.

Graphic Designer
Responsible for graphic design, presentation creation, and website development. Contributed to hardware implementation, supporting system assembly and integration.

Software developer
Developed the mobile application used to control the robot, ensuring smooth communication and user interaction. Also contributed to hardware development and system integration.

Hardware Development
Conducted extensive field testing and performance evaluation. Responsible for benchmarking system efficiency and preparing technical documentation.
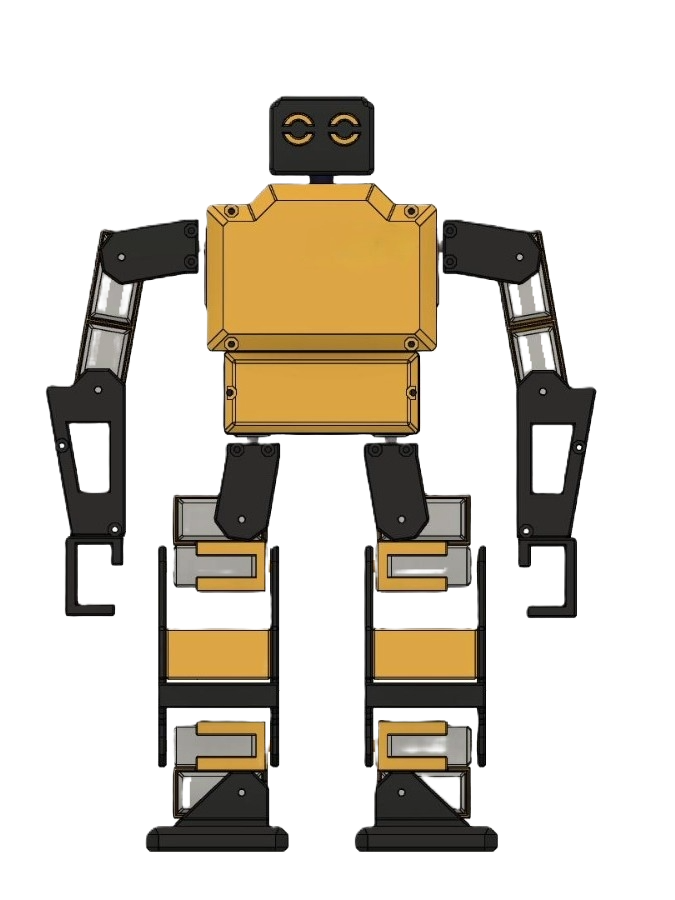
Robot Front View
Front view showing the complete humanoid structure

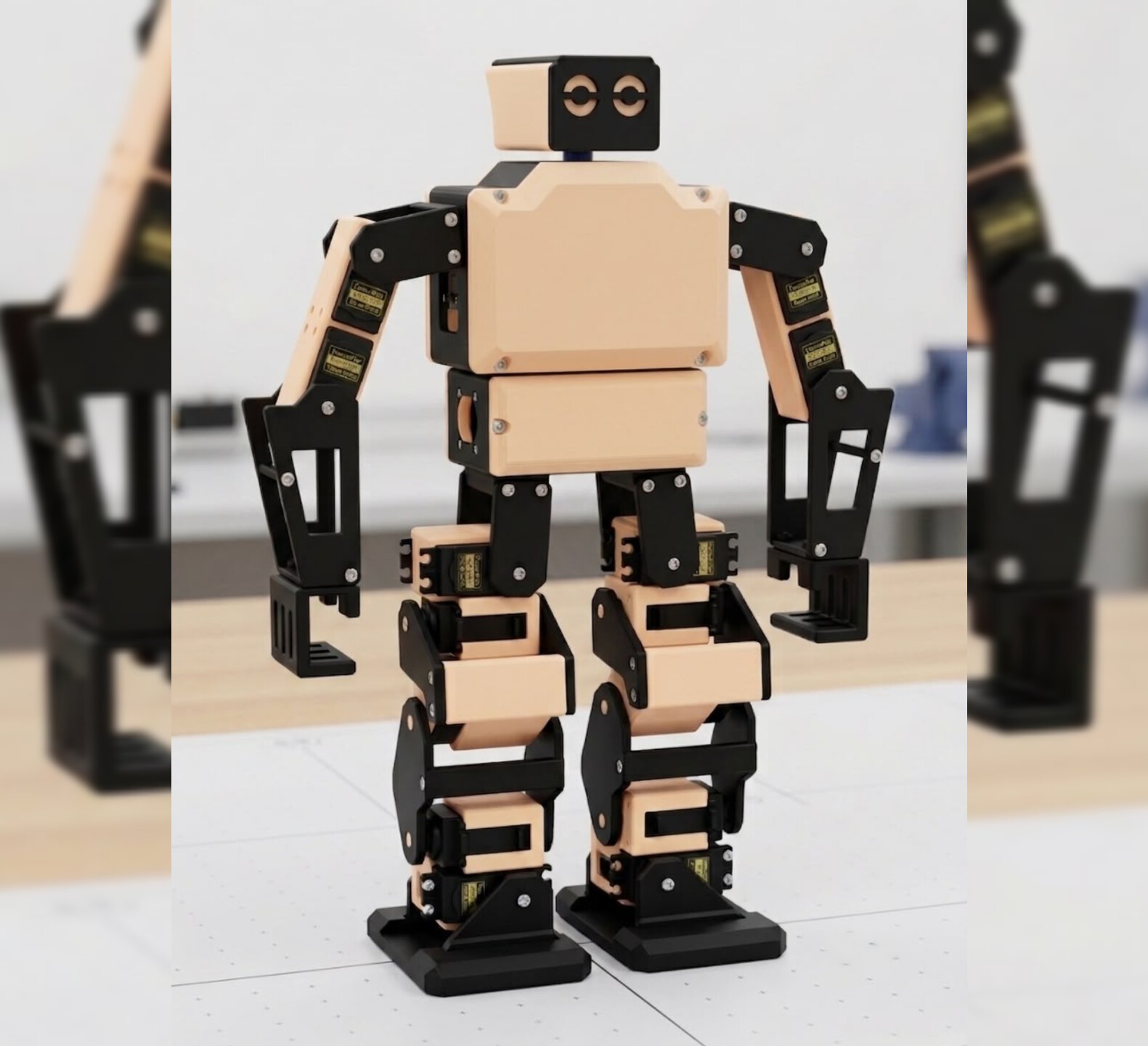
Back View
Rear view with electronics

Leg Detail
Leg servo arrangement
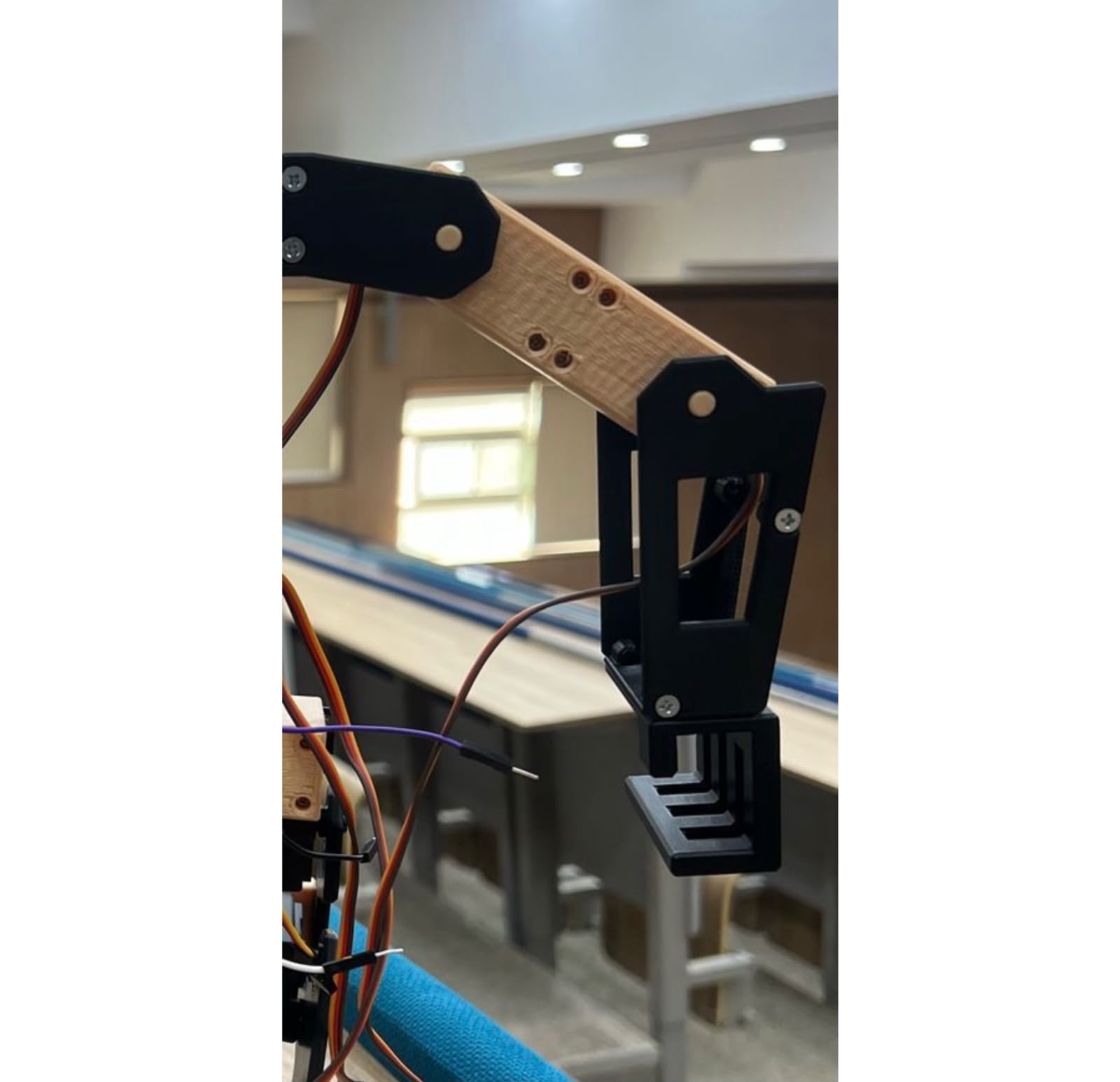
Arm Detail
ARM DETAILS

Electronics
Internal control board

Head Detail
Head assembly with dual-eye
byterobotbhr@gmail.com
University
October Technological University
Phone
01050130753
